
A concrete example
When complexity is beyond basic and documentation is pure, discovering existing C++ frameworks can be difficult. This is where automatic mapping of C++ entities into knowledge frames (Minski’s classic AI approach to knowledge representation [1]) via static code analysis can help. To show the benefit, let’s discover the C++ lib OGDF, a powerful open graph drawing framework[2]. With its 500kLOCs of header and source lines, it is already a fairly complex framework. Failure to initialize elements will cause runtime errors. So usage is not obvious, and good documentation, especially on what needs what, and on do and don’t, would help.
In this particular case, We have a getting-started-guide, examples, and papers addressing the scientific background. And of course a doxygen run, which collects doc strings. But it leaves quite a lot of areas open. Quite a few doc-strings are just repeating what has been already said in the class or function name. That’s not nice but it reflects daily live of C++ programmers - in companies and academics.
What can we do to get started in an efficient way? Let’s harvest implicit knowledge.
Even when not written down, the knowledge is implicitly there. Code has been created by humans, which need to think in language constructs. We postulate that C++ constructs must in some way refer to language ones. Where are the domain names of context, modules, concepts, entities, objects, instances, rules, relations, attributes etc.. How to they relate, in what way? And in each category there will be some hierarchy as otherwise no human could have developed the framework. But how to make this a practical approach?
To avoid to open the full complexity of knowledge representation and natural language understanding, we start with a quite simple strategy. Map C++ to just a few natural language constructs, which are used to collect knowledge frames in classical AI (f.Ex. concept net or wordnet) and store them in a knowledge graph.
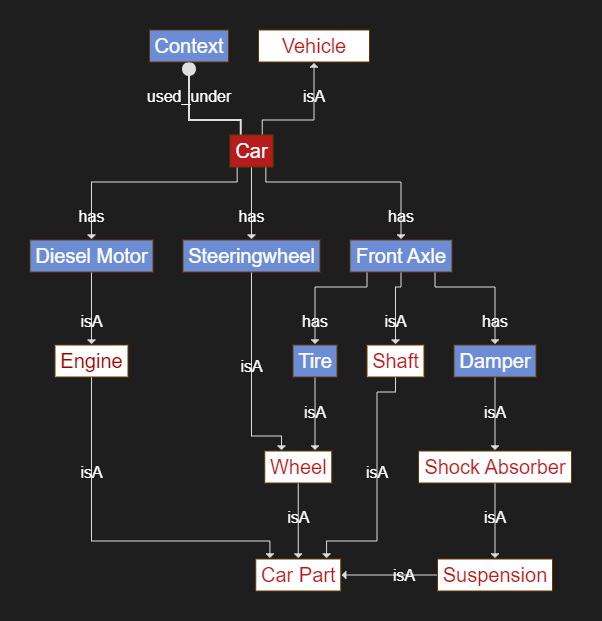
In a sense, we create a knowledge frame or archetype from the C++
code, which should describe the domain knowledge implicitly present in
the code. We get a graph showing the base concepts (framed in red), the
concepts we need to select for implementation (filled in black), the
entry point (filled in red), the initial call call(GA), and their
isA and has_m_X relations. The graph produces
an implementation space of 20-50 header files in a fairly compact way.
It is important to note that it does not just cover one, no it covers a
full family of behaviors.
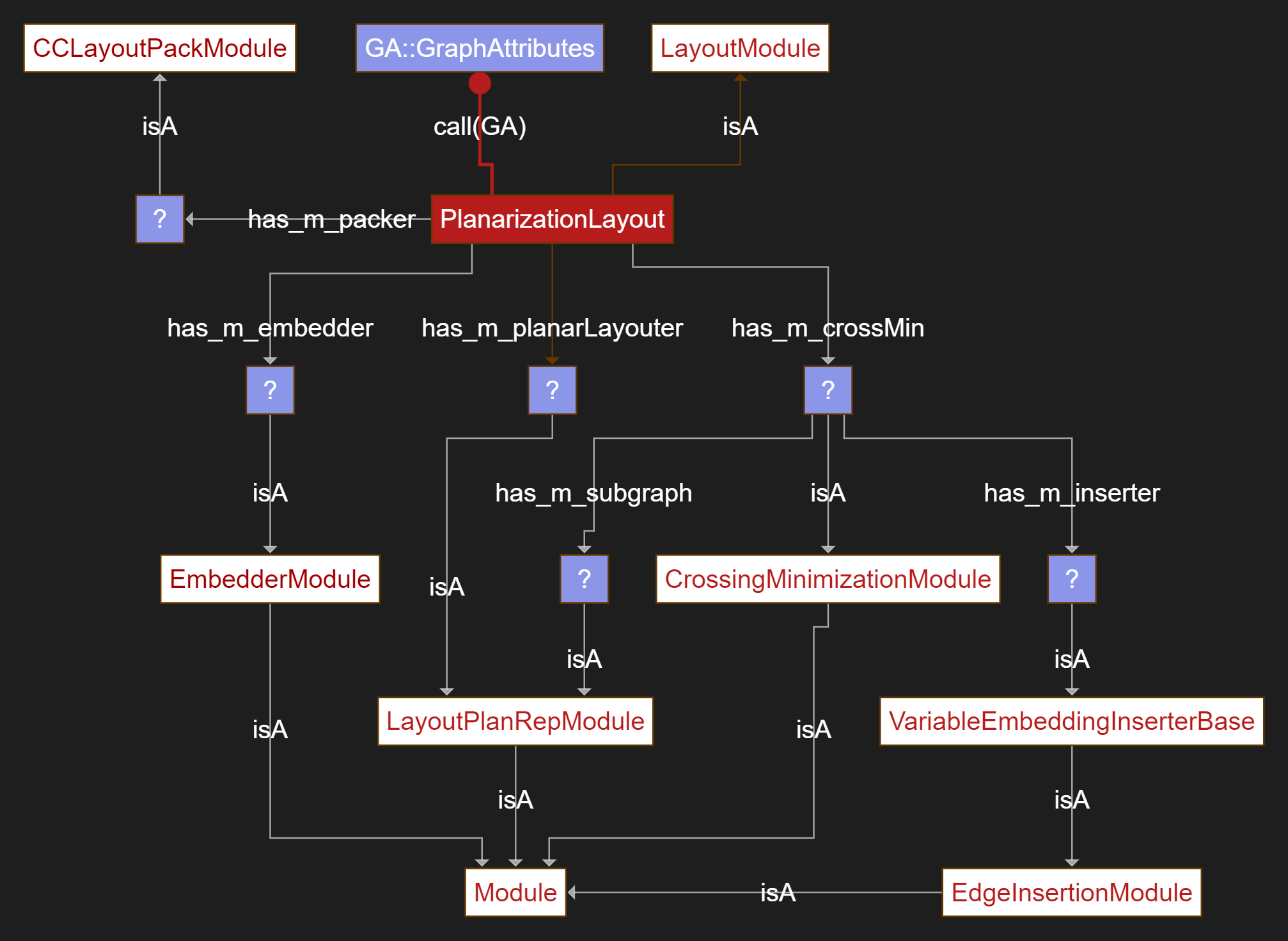
The graph is quite compact. In AI talk it’s an archetype and covers
all layout variants you can implement with
PlanarizationLayout.
There are three fundamental concepts and 7 base concepts
Module: Base concept for all algorithms
implementedCCLayoutPackModule: Packs connected components (CC) in
a layout engineLayoutModule : Base concept of all e2e engines
implementedCrossingMinimizationModule: Minimizes crossing of edges
of non planar graphEdgeInsertionModule: Inserts edges in an optimized
wayVariableEmbeddingInserterBase (inherits
EdgeInsertionModule)EmbedderModule: Algorithms which embeds graphs in some
wayLayoutPlanRepModule: Algorithms which calculate layouts
of planar graphsBy following the has_m_X dependencies we can envision
how to implement a PlanarizationLayout:
myPlanaritationLayout and
assure thathas_m_X concepts are implemented, which are given
byisA hierarchy shown in
the graphmyPlanaritationLayout.call(GA)Let’s compare this with a real code example. The layout call is
embedded in a GraphIO context that loads a sample graph data and writes
the layout to disk, which is another use case we could discover by using
GraphIO as an entry point.
Looking at the actual construction of
PlanerizationLayout, we can confirm our knowledge graph. It
describes the creation of all concrete instances of the base classes we
extracted. Some attributes are overridden, others are used as defaults.
Finally, pl.call(GA) is called. Our graph has captured the
main concepts needed to write orthogonal planarization layout code in
one view.
using namespace ogdf;
int main()
{
Graph G;
GraphAttributes GA(G,
GraphAttributes::nodeGraphics | GraphAttributes::nodeType |
GraphAttributes::edgeGraphics | GraphAttributes::edgeType);
if (!GraphIO::read(GA, G, "ERDiagram.gml", GraphIO::readGML)) {
std::cerr << "Could not read ERDiagram.gml" << std::endl;
return 1;
}
for (node v : G.nodes)
{
GA.width(v) /= 2;
GA.height(v) /= 2;
}
PlanarizationLayout pl;
SubgraphPlanarizer *crossMin = new SubgraphPlanarizer;
PlanarSubgraphFast<int> *ps = new PlanarSubgraphFast<int>;
ps->runs(100);
VariableEmbeddingInserter *ves = new VariableEmbeddingInserter;
ves->removeReinsert(RemoveReinsertType::All);
crossMin->setSubgraph(ps);
crossMin->setInserter(ves);
pl.setCrossMin(crossMin);
EmbedderMinDepthMaxFaceLayers *emb = new EmbedderMinDepthMaxFaceLayers;
pl.setEmbedder(emb);
OrthoLayout *ol = new OrthoLayout;
ol->separation(20.0);
ol->cOverhang(0.4);
pl.setPlanarLayouter(ol);
pl.call(GA);
GraphIO::write(GA, "output-ERDiagram.gml", GraphIO::writeGML);
GraphIO::write(GA, "output-ERDiagram.svg", GraphIO::drawSVG);
return 0;
}In the example above, 5 concepts have been derived from a base that is represented by 1 slot in the archetype.
OrthoLayout:LayoutPlanRepModuleEmbedderMinDepthMaxFaceLayers:EmbedderModuleSubgraphPlanarizer:CrossingMinimizationModulePlanarSubgraphFast:LayoutPlanRepModuleVariableImbeddingInserter:VariableImbeddingInserterBaseWhich gives a filled frame:
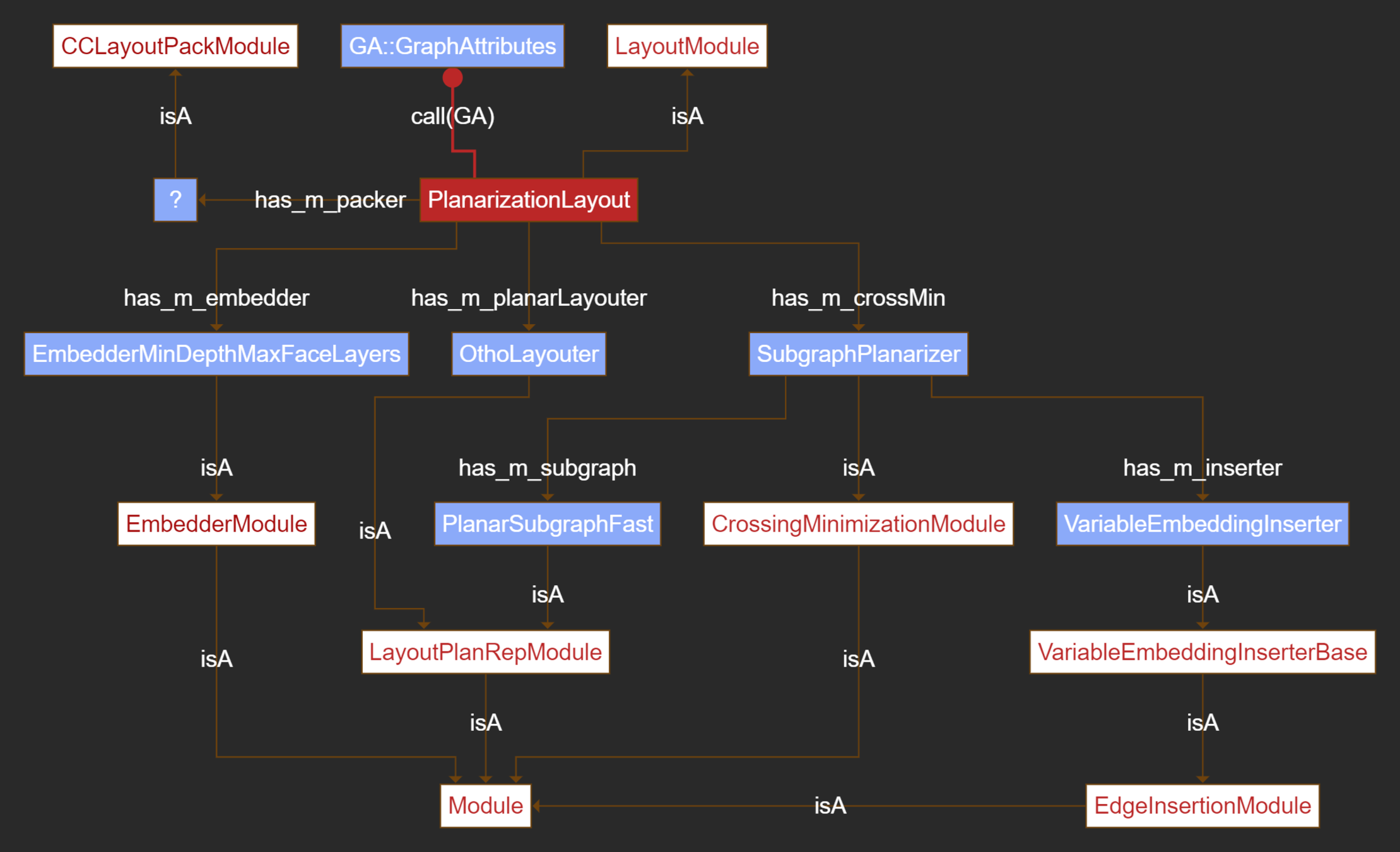
As expected one slot is not filled, as it is dealing with connected components, which is not applicable to our graph type (no components used).
We saw just one way to fill the class inheritance for the empty slots. As you might guess, the archetype can be filled in quite different ways. It presents the space of all potential implementations. Some are intended, others are just misuse (which will fail during runtime). To make this explicitly written down is another obvious benefit.
Fur sure it’s not always as simple to recover main concepts in C++
code. Typically you have to map more constructs of C++. Friend would be
a next step. And you will see more complex dependencies. But the
isA, hasX hierarchy is always a good starting
point. It gives a dense knowledge graphs of concepts, covering a wide
area of code.
By comparing the resulting concepts with usage examples, the knowledge graph can be verified. Valuable explicit knowledge can be created. We get an initial understanding of the code from which we can proceed.
I think this is a good way to develop trust in the comprehension, and to create top level documentation automatically, which assures proper usage of the framework.
Via this we have a fast path to build much more comprehensive documentation/understanding from code not only in the graph drawing world.